
Background
원프레딕트에서는 산업 설비의 진단 및 예지 보전을 위해 설비에 대한 진동, 전류, 온도 등의 데이터를 수집합니다. 이때 산업 현장의 경우 예상치 못한 노이즈에 의해 데이터가 왜곡될 가능성이 높습니다. 따라서 양질의 데이터를 확보하기 위해서 노이즈 저감 대책은 필수적입니다.

노이즈란 정상신호에 간섭하여 정보의 전달을 방해하거나 시스템의 오동작을 일으키는 원하지 않는 신호입니다[1].
노이즈는 발생 원인에 따라 종류가 다양한데, 열, 충격 등으로 인한 시스템 내부 노이즈와 인공(불꽃방전, 코로나 방전 등), 자연(대기 노이즈, 태양 노이즈)에 의한 시스템 외부 잡음으로 나눌 수 있습니다[2]. 그리고 노이즈의 전달 경로에 따라서 전선이나 기판의 배선을 경유하여 전달되는 전도성 노이즈와 공기 중으로 방출되는 방사성 노이즈로 나눌 수 있습니다.
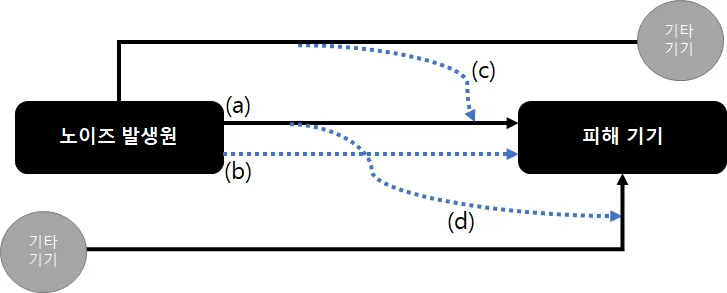
그림 1. 노이즈의 전달 경로
그림 1에서는 노이즈의 다양한 전달 경로들을 살펴볼 수 있습니다.
•
(a) : CE(Conduction Emission, 전도성 방출) : 도체를 통해 전달되는 경로
•
(b) : RE(Radiated Emission, 복사성 방출) : 공간을 통해 전달되는 경로
•
(c) : CE → RE : 처음에는 도체를 통해 전달되다가 중간에 도체가 아닌 공간을 통해 전달되는 경로
•
(d) : RE → CE : 처음에는 공간을 통해 전달되다가 중간에 공간이 아닌 도체를 통해 전달되는 경로
따라서 노이즈에 대한 저감 대책을 세우기 위해선 노이즈의 원인과 전달 경로를 파악하고 이에 맞는 방안을 구성해야 합니다.
원프레딕트는 로봇 진단 솔루션을 개발하는 과정에서 체결된 전류센서에 심각한 노이즈가 발생해 원하는 신호가 묻히는 현상을 확인했었습니다. 본 글에서는 로봇에 체결된 서보모터의 전류를 측정할 때 생긴 노이즈를 분석하고, 저감시킨 과정을 서술해보려 합니다. 우선 문제 정의를 통해 기본적인 측정 환경과 측정 시 생긴 이슈에 대해 다루고 노이즈의 원인이 무엇인지 파악해보겠습니다. 그 후 3가지 방법으로 구성한 문제 해결을 통해 실제로 어떻게 노이즈를 저감시켰는지와 그 효과에 대해 보여드릴 예정입니다.
문제 정의
1. 측정 환경

그림 2. 서보모터 측정 시스템 구조도
서보모터를 측정하기 위한 시스템의 구조도는 그림 2와 같습니다. 기본적으로 SMPS(Switched Mode Power Supply)에서 서보모터로 전원을 공급하고, 전류센서가 그 중간에 위치하여 전류를 측정합니다. 측정한 값은 DAQ(Data Acquisition) 시스템으로 보내져서 ADC(Analog Digital Converter)를 통해 센싱 값을 저장하게 됩니다.
ADC의 역할
2. 측정 시스템 구성 요소
2.1. 서보모터
.jpg&blockId=806da1b7-924d-4035-b1a9-07b5d6ab47f2)
그림 3. 서보모터
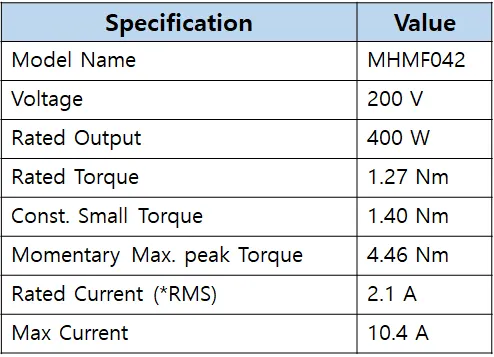
표 1. 사용된 서보모터의 스펙
* RMS = Root Mean Square
2.2. 전류 센서
.jpg&blockId=e6566a5f-d7d8-408e-9367-455cb73e945b)
그림 4. PCB를 활용한 전류 센서 보드
그림 4과 같은 전류 센서 보드 (Hall effect sensor)를 사용하고, USB-6000과 NI 9230의 명칭을 지닌 DAQ 시스템을 활용하여 서보모터의 전류를 측정하였습니다. Hall effect sensor의 특성상 전류 측정의 출력은 전압으로 나타납니다.
* 기본 측정 조건은 1000Hz Sampling rate, 5초 계측으로 설정하였습니다.
Hall effect sensor 기본 지식
DAQ란?
3. 노이즈 현상의 발견
위와 같은 측정 환경을 구성하여 서보모터를 동작하기 위해 브레이크를 푸는 순간 예상치 못한 노이즈가 발생하였고, 이는 계측에 큰 영향을 줄 정도로 큰 수준이었습니다. 계측한 결과는 다음과 같습니다.
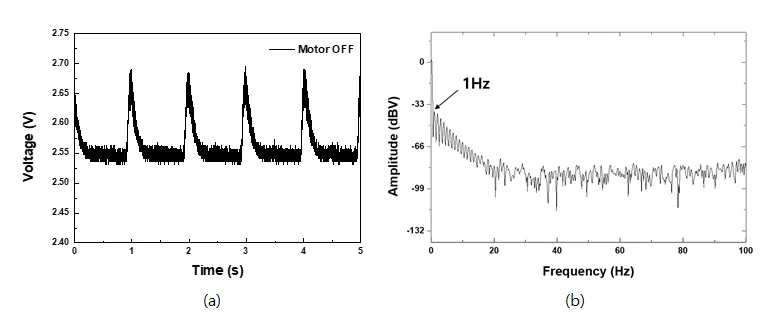
그림 5. 브레이크가 풀린 상태에서 전류센서 데이터 (a: 시간 영역, b: 주파수 영역)
계측하는 동안 모터는 회전하지 않았고, 따라서 인가되는 전류가 별도로 없었습니다. 그렇기 때문에 계측된 데이터는 아주 작아 무시할 수 있는 수준의 노이즈만이 보여야 합니다. 그러나 그림 5의 시간영역(a)에서 보이듯, 서보모터의 브레이크가 풀리고 작동준비에 들어가면 규칙적으로 파도가 치는 듯한 노이즈가 발생하는 현상이 관측되었습니다. 이를 주파수 영역(b)에서 확인해보면 1 Hz에서 peak가 치솟는 것을 확인할 수 있었습니다.
왜 브레이크가 풀렸는데 노이즈가 발생할까요?
노이즈가 발생했더라도 충분히 작은 수준이라면 감안하고 넘어갈 수 있습니다. 혹시나 서보모터가 회전해서 발생하는, 즉 우리가 계측해야 하는 신호가 노이즈에 영향을 받을지 여부를 확인해보기 위해 서보모터를 가동해 신호를 확인했습니다.
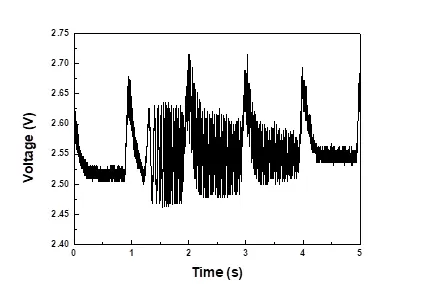
그림 6. 서보모터 동작 시 전류센서 데이터
그림 6는 노이즈가 발생한 환경에서 서보모터가 동작했을 경우의 데이터를 나타낸 것입니다. 결과적으로, 모터 동작 전류의 peak to peak과 노이즈의 peak to peak가 비슷할 정도로 노이즈가 크게 관찰됨을 알 수 있습니다. 즉, 계측하고자 하는 신호에 비교했을 때 노이즈 크기가 너무 커서 신호의 품질에 충분히 손상을 미칠 수 있는 수준으로 판단되었습니다.
보통 이런 형태의 파형은 SMPS나 DC/DC converter에서 DC 파형을 얻기 위해 스위칭할 때 생기는 노이즈에서 비슷한 형태를 볼 수 있습니다.
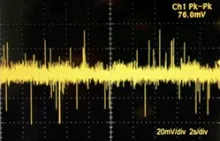
그림 7. Typical Output Noise from a Linear Regulator [4]
그림 7 처럼 갑자기 신호 중간 노이즈에 의해 튀는 형태임을 볼 수 있습니다. 하지만 SMPS의 노이즈는 위 그림처럼 고주파수 대역에 있고, 문제 상황에서는 노이즈가 너무 낮은 주파수 영역(1Hz Peak)이기 때문에 SMPS의 영향으로 생각하긴 어려웠습니다. 결과적으로 관측된 노이즈의 원인은 브레이크를 풀기 위해 전원을 공급할 때 생긴 미상의 신호가 흘러온 것으로 판단했습니다.
Conclusion
본 글에서는 노이즈에 대한 기본적인 Background와 노이즈가 발생한 문제 상황에 대해 서술해 보았습니다. 다음 글에서는 이러한 서보모터의 전류 측정 시에 생겼던 노이즈를 인지하고, 그 원인을 찾아 저감시키기 위한 과정들을 서술해보려 합니다.
2편에서는 먼저 여러 가설들에 기반해 노이즈의 원인을 추정해볼 것입니다. 그렇게 노이즈의 원인이 도출되고 나면 이를 해소하기 위한 적절한 방법론들을 적용시켜가며 노이즈가 해결되는 과정을 확인해보도록 하겠습니다.
IoT 이어보기
•
서보모터 노이즈 저감 대책 (1) (현재 글)
참조
[1] 한국공학기술연구원 EMI/EMC 대책 기본
[2] 정보통신기술용어해설, accessed 10 June 2021, <http://www.ktword.co.kr/abbr_view.php?nav=&m_temp1=440&id=233
이 글을 쓴 사람

유 건 우 | IoT 팀
맛있는걸 먹고, 사람들과 공유하는 것을 좋아합니다.
로봇을 타겟으로 삼아 계측 시스템을 구성하고 있습니다.
이 외에도 항상 새로운 것을 배우며 성장 중입니다.
원프레딕트 홈페이지
https://onepredict.ai/
원프레딕트 블로그
https://blog.onepredict.ai/
원프레딕트 기술 블로그
https://tech.onepredict.ai