
Intro.
진동(vibration)은 회전기계가 작동할 때 나타나는 흔들림 현상이며, 직관적으로 느낄 수 있습니다. 진동은 구조물에서도 나타나지만, 특히 기계의 열화(degradation) 또는 상태(condition)변화로 발생할 때 파괴력을 가집니다. 따라서 진동이 가진 정보를 분석해 기계의 고장진단과 예측을 할 수 있습니다.
이러한 진동의 물리량은 변위(displacement), 속도(velocity), 가속도(acceleration)로 표현할 수 있습니다. 진동을 계측하기 위해선 진동센서가 필요합니다. 진동센서는 앞서 말한 물리량에 따라 3가지로 나뉘는데, 진동의 변위를 측정할 수 있는 변위센서, 속도를 측정할 수 있는 속도센서, 가속도를 측정할 수 있는 가속도센서 또는 가속도계로 구분되어 있습니다. 이 중에서 부착방법이 비교적 쉽고 보편적으로 많이 사용하는 가속도계에 대해 알아보겠습니다.
센서 선정은 고장진단의 시작이며 정확한 데이터를 얻는 첫 걸음입니다. 부적절한 센서의 사용은 “Garbage In = Garbage Out” 쓰레기가 들어가면 쓰레기가 나오는 첫 걸음이 될 수 있습니다.
원프레딕트는 모터, 펌프, 발전터빈, 풍력발전기 등 산업의 주요설비에 대해 진동 데이터를 기반으로 진단하고 예측하는 솔루션을 제공합니다. 솔루션에 신뢰성을 기여하기위해 센서 선정부터 HW개발까지 집중하고 있습니다. 가속도계는 구조, 제조방식 등에 따라 종류가 무척 다양합니다. 목적에 맞는 센서를 선정할 때 기본적으로 알아야하는 정보들이 있습니다. 따라서 이 글을 통해 가속도센서를 선정하기위해 필수적인 내용에 대해 다루고자 합니다.
가속도계의 원리
가속도계의 기본적인 원리는 두 가지 물리 법칙을 통해 알 수 있습니다.
F = MA (F=Force, M=Mass, A=Acceleration)
식 (1) 뉴턴의 운동 법칙
F = (=displacement, =spring constant)
식 (2) 후크(hooke)의 법칙
두 식을 연립하면, 가속도 A =
A =
식 (3)
로 구할 수 있습니다.
그림 1을 보면, 만큼 움직이는 질량의 가속도는 와 비례하는 것을 한눈에 알 수 있습니다.
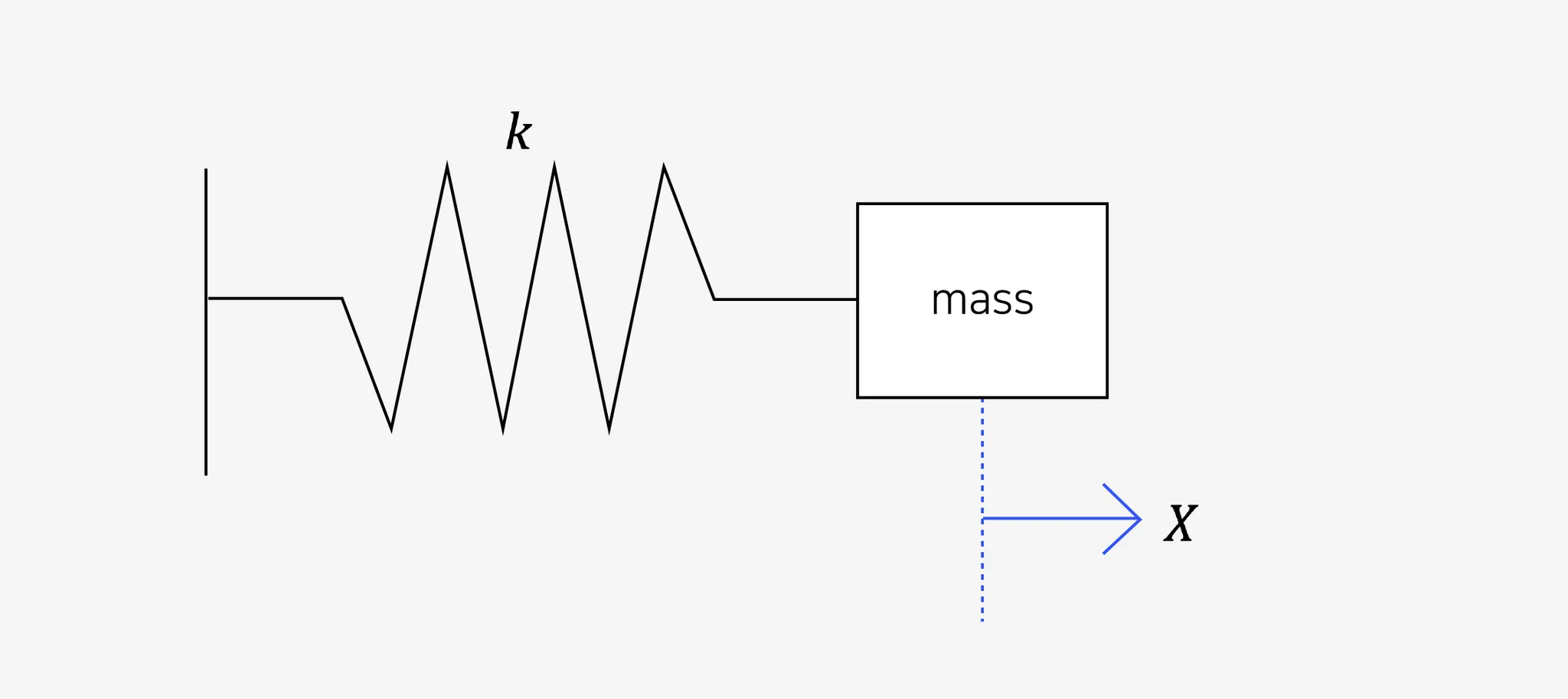
그림 1. 가속도계 원리
가속도계의 종류
가속도센서는 다양한 산업에서 널리 사용되고 있습니다. 실질적으로 가속도센서는 AC 응답 가속도계, DC 응답 가속도계 두 가지로 크게 구분할 수 있고, 그에 따른 응답특성을 알아야 합니다.
AC 응답 가속도센서는 DC 신호 성분을 필터링하는 커패시터(capacitor)가 구성되어 High pass가 적용됩니다. 따라서 동적인 신호를 측정하는 데 적합합니다.
반면에 DC 응답 가속도 센서는 DC 신호 성분을 필터링하는 커패시터가 없기 때문에 중력과 같은 정적인 신호와 0Hz에 근접한 신호를 측정할 때 유리합니다. 이처럼 각 센서들은 장단점을 가지고 있기 때문에 목적에 맞게 사용하는 것이 중요합니다.
1. AC 응답 가속도계
압전형 가속도계 (Piezoelectric Accelerometer)
압전(Piezo)이란? 말 그대로 압력이 가해지면 전기가 발생한다는 뜻입니다. 압전소자(Piezoelectric materials)는 압전성이 뛰어난 PZT(티탄산 지르콘산 연 이라는 화합물의 약자)를 사용하고, 전기신호의 출력 방식에 따라 전하(Charge)타입과 전압(Voltage)타입으로 나뉘어집니다.
먼저 전하타입 즉, 차지타입은 신호를 증폭시켜줄 증폭기(Amplifier)가 시스템 외부에 구성되기 때문에 고온에 견딜 수 있는 이점이 있습니다. 하지만 그림 2 와 같이 증폭기를 따로 구성해야 한다는 점에서 높은 구성비용과 설치과정의 번거로움이 단점으로 작용합니다. 전압타입은 증폭회로가 센서에 내장된 구조이며 제조사에 따라 ICP(Integrated Circuit Piezoelectric)타입 혹은 IEPE(Integrated Electric Piezoelectric)로도 불려집니다.
전압타입은 전하로 출력되는 전기신호를 전압으로 변환하기 위해 트랜스듀서(transducer)가 센서내부에 존재합니다. 하지만 미세하게 출력되는 전압신호를 증폭시키기 위해 증폭기도 함께 내부에 구성되어집니다. 그림 3을 보면 차지타입과 달리 외부에 증폭기를 구성할 필요 없으며, 낮은 구성비용과 간소한 설치과정이 장점입니다.
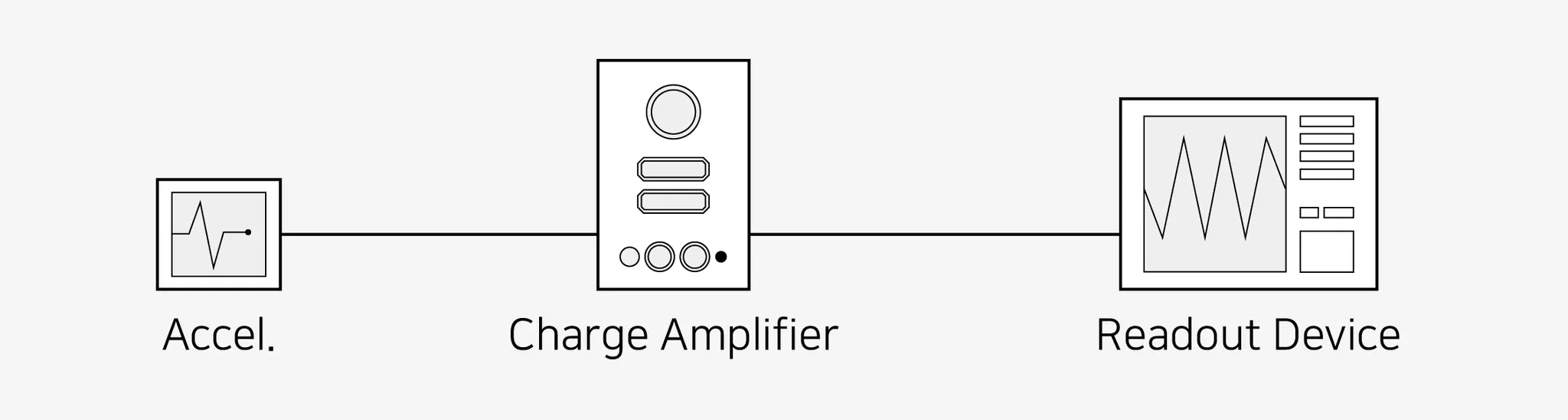
그림 2. 차지타입 가속도계 구성도
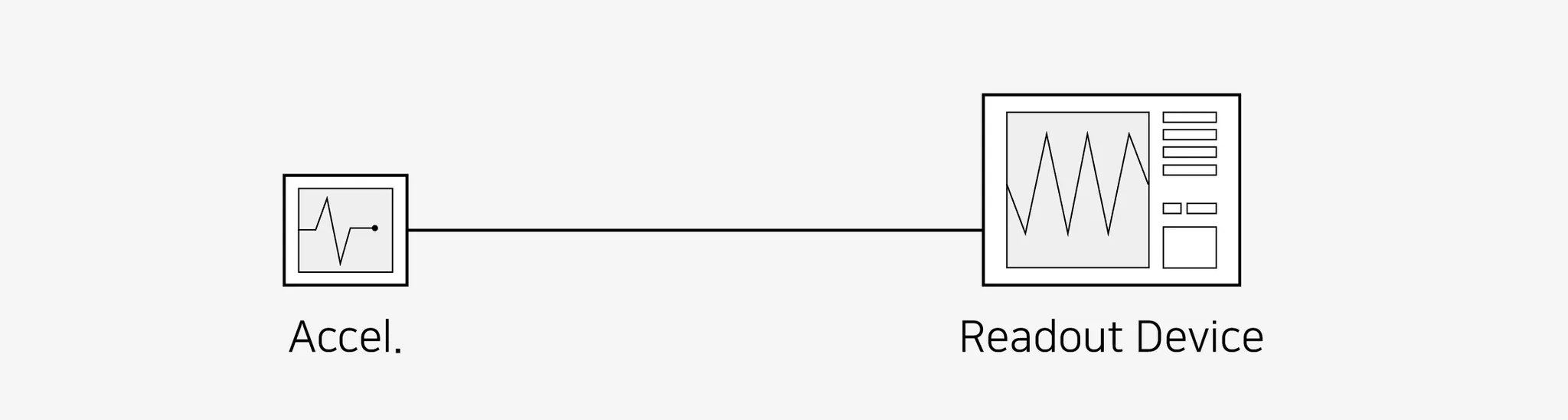
그림 3. 전압타입 가속도계 구성도
2. DC 응답 가속도계
정전용량형 가속도계 (Capacitive Accelerometer)
MEMS(Micro Electro Mechanical Systems)기술로 만들어진 대표적인 MEMS 센서입니다. 그림 4의 고정된 판과 외력에 의해 움직일 수 있는 판 사이의 전하량 변화를 통해 가속도를 측정할 수 있습니다. 압전형 가속도센서와 가장 큰 차이점은 저 주파수 대역에 대해 일정한 전기적 신호 출력이 가능합니다.
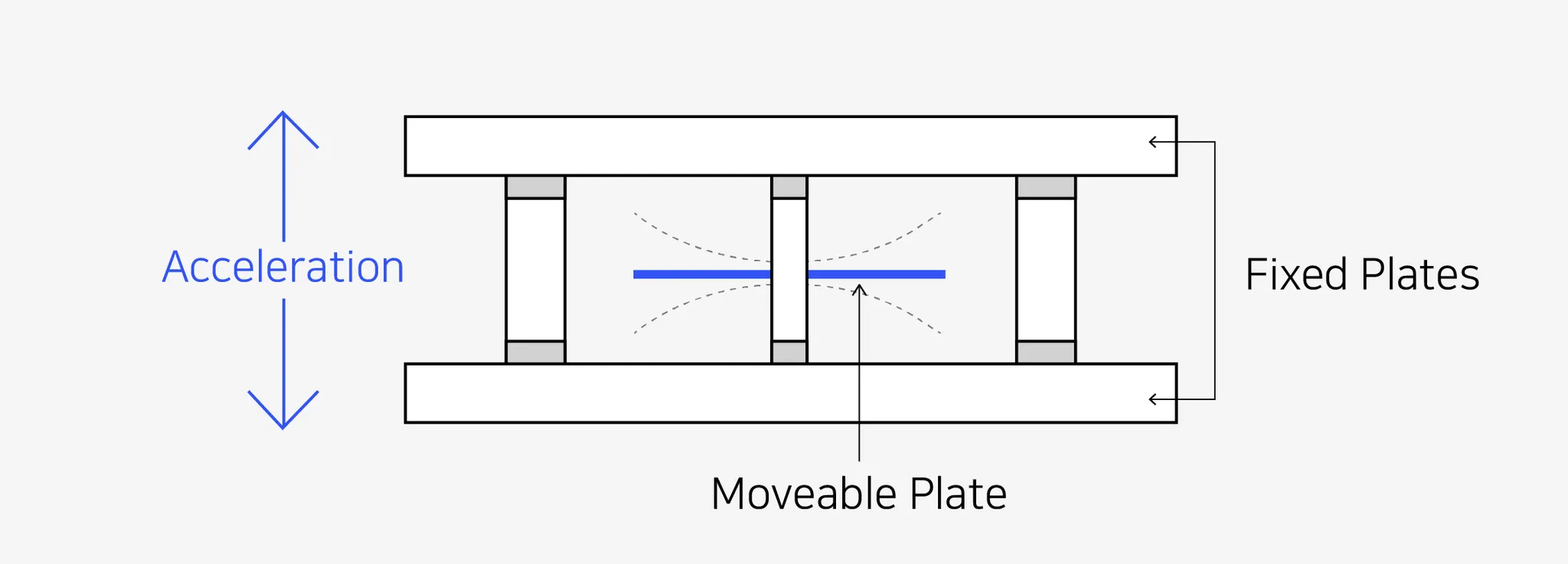
그림 4. 정전용량형 가속도계 원리
압저항 가속도계 (Piezo Resistive Accelerometer)
압저항 가속도계는 그림 5와 같이 압전소자(저항체)에 외력이 가해지면서 압전소자의 길이와 저항이 비례하게 변하는 현상입니다. 이러한 현상을 이용한 센서로 저주파부터 고주파까지 넓은 대역폭을 측정할 수 있는 성능을 가졌습니다. 또한 MEMS타입 센서의 공통점인 소형화가 가능하고 높은 진폭대역을 측정할 수 있어서 주로 더미(dummy), 자동차 충돌 테스트에 활용되어집니다.
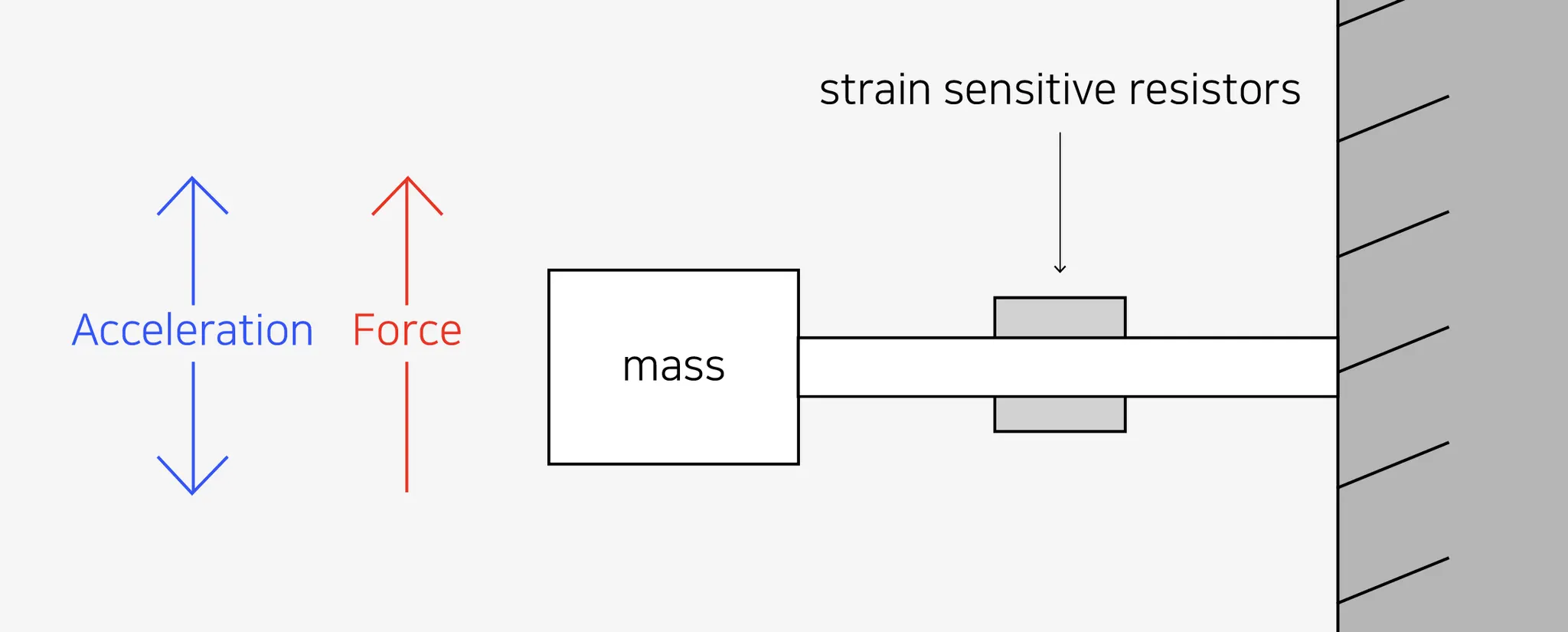
그림 5. 압저항 가속도계 원리
가속도계의 특성
가속도계의 원리와 종류를 알아봤습니다. 가속도계를 선정하기위해 무엇보다 특성을 고려하는 것이 가장 중요합니다.
필수로 알아야 할 특성은 그림 6의 IEPE 센서 데이터 시트를 보며 알아보겠습니다.
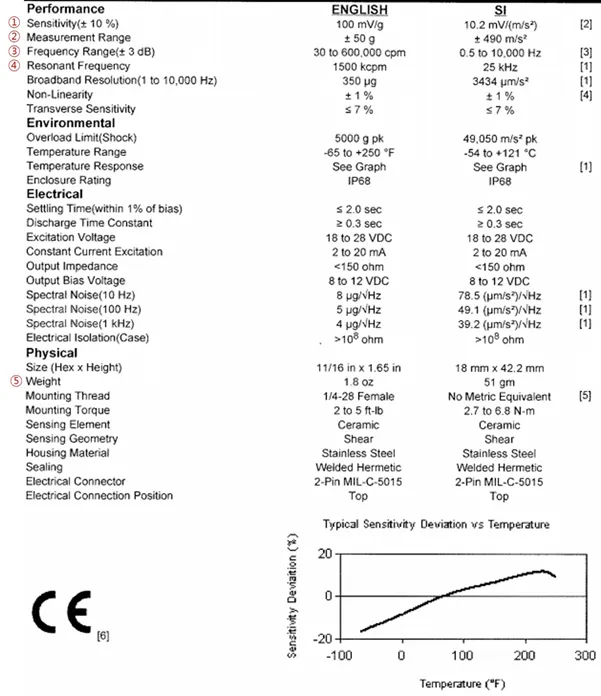
그림 6. IEPE 가속도계의 데이터시트 [1]
1. 감도 (Sensitivity)
감도는 가장 먼저 고려해야하는 특성으로, 기계적 에너지를 전기 신호로 변환하는 비율입니다. 즉 단위 가속도 또는 중력가속도에 대한 출력전압을 뜻합니다. 감도가 좋을수록 측정가능한 주파수는 낮아지는 반비례 관계를 가집니다.
2. 측정범위 (Measurement range)
측정범위는 측정할 수 있는 진폭의 범위를 말합니다. 감도에 비례한 특성을 가지고 있으며, 일반적으로 측정범위보다 약 20% 여유롭게 사용하는 것이 좋습니다.
3. 주파수범위 (Frequency range)
주파수범위는 측정할 수 있는 대역을 뜻합니다. 해당 데이터 시트는 AC 응답 가속도계로 0.5Hz 부터 10kHz까지 선형적으로 응답하는 걸 알 수 있습니다.
4. 공진주파수 (Resonant Frequency)
공진주파수는 모든 물체가 가지고 있는 고유 특성입니다. 당연히 센서도 공진주파수를 가지고 있으므로, 고주파수 대역을 측정하기 위해서 꼭 살펴봐야 할 부분입니다. 측정하고자 하는 목표주파수와 겹치지 않도록 해야 합니다.
5. 무게 (Weight)
가속도계의 무게는 진동특성에 영향을 주는 인자로써 반드시 확인해야합니다. 특히 초소형 부품의 진동을 측정하는 경우, 대상체 무게에 10%를 넘지 않도록 주의해야 합니다. [2]
그 밖에 설치할 환경과 대상체에 따라 축(axis)의 수, 온도, 방수조건, 케이블의 길이 등을 추가적으로 고려해야합니다.
Conclusion
목적에 맞는 가속도계를 선택하기 위해 기본적인 원리와 종류를 알아보았습니다. 가속도계의 원리는 뉴턴의 운동 법칙과 후크의 법칙을 통해 가속도를 도출할 수 있었습니다.
AC 또는 DC 응답에 따라 크게 2가지로 나눌 수 있으며, 일반적으로 AC 응답 가속계를 사용하고 IEPE타입이 주로 사용됩니다. 0 Hz에 근접한 신호를 측정하기 위해서는 DC 응답 MEMS 센서가 사용됩니다. 마지막으로, 가속도계의 선택기준은 측정하고자 하는 대상설비에 따라 다르지만, 측정가능한 진폭 레벨, 주파수 범위 등 데이터 시트에 나와있는 정보를 통해 확인할 수 있습니다.
Reference
[1] https://www.pcb.com/products?m=603c01
[2] Lee, J. Y., 2015, Model Updating in Small Structural Dynamics Model by Elimination of Mass Loading Effect of Accelerometer, Transactions of KSNVE, Vol.25, No. 1, pp. 40~47.
IoT 이어보기
•
진동센서: 가속도계의 원리와 종류 그리고 특성 (현재 글)
이 글을 쓴 사람

백 종 희 | IoT팀
원프레딕트 IoT팀에서 데이터 인프라 구축을 위해 센서와 HW를 다루고 있습니다.
“ Better than yesterday! ” 어제 보다 나은 오늘을 만들기 위해 매일매일 원프레딕트와 함께 하고 있습니다!
원프레딕트 홈페이지
https://onepredict.ai/
원프레딕트 블로그
https://blog.onepredict.ai/
원프레딕트 기술 블로그
https://tech.onepredict.ai