
지난 1편에서는 노이즈에 대한 기본 배경지식과 실제로 일어난 문제상황을 다뤘습니다.
2편에서는 노이즈를 저감시킨 3가지 방법에 대해 서술할 예정입니다.
문제 해결 1. 노이즈 발생원과의 이격
어떤 문제 상황이 발생했을 때 그 상황이 왜 일어났는지 파악하기 위해선 영향을 준 요소 하나하나를 따로 놓고 생각해봐야 합니다.
예를 들어서 식당에서 카레를 먹었을 때 배탈이 났다는 상황을 가정해보겠습니다. 카레에는 강황, 감자, 당근, 고기 등등이 있기 때문에 한꺼번에 섭취하였을 때는 모르고, 감자 따로 먹어보고 괜찮은지 확인 후 당근도 먹어보는 등 하나하나 확인해봐야 어떤 것이 배탈의 원인인지 파악할 수 있습니다.
노이즈도 마찬가지로, 노이즈를 저감시킬 때 기본적으로 해야할 것은 각 요소별로 분리하여 한 요소씩 측정해보는 것입니다. 구성 요소는 처음에 보여드린 서보모터 측정 시스템 구조도와 같이 서보모터, SMPS, 전류센서, DAQ 시스템으로 구성되어 있습니다.
1) 센서의 문제일까? DAQ의 문제일까?
이들 중 계측에 관련된 시스템은 전류센서와 DAQ 시스템이기 때문에 이 요소들 먼저 파악을 시도해보았습니다. 이 경우 전류센서가 문제일 수도 있고, DAQ 시스템이 문제일 수도 있고, 두 가지 모두가 문제일 수 있습니다.
우선 시도해본 것은 DAQ 에 문제가 있을 것이라 가정을 내리고 전류 센서를 분리한 후 DAQ 만을 이용하여 계측을 시도해보았고, 그 결과 그림 1에서와 같이 문제 상황과 비슷한 파형의 큰 노이즈가 관찰되었습니다.
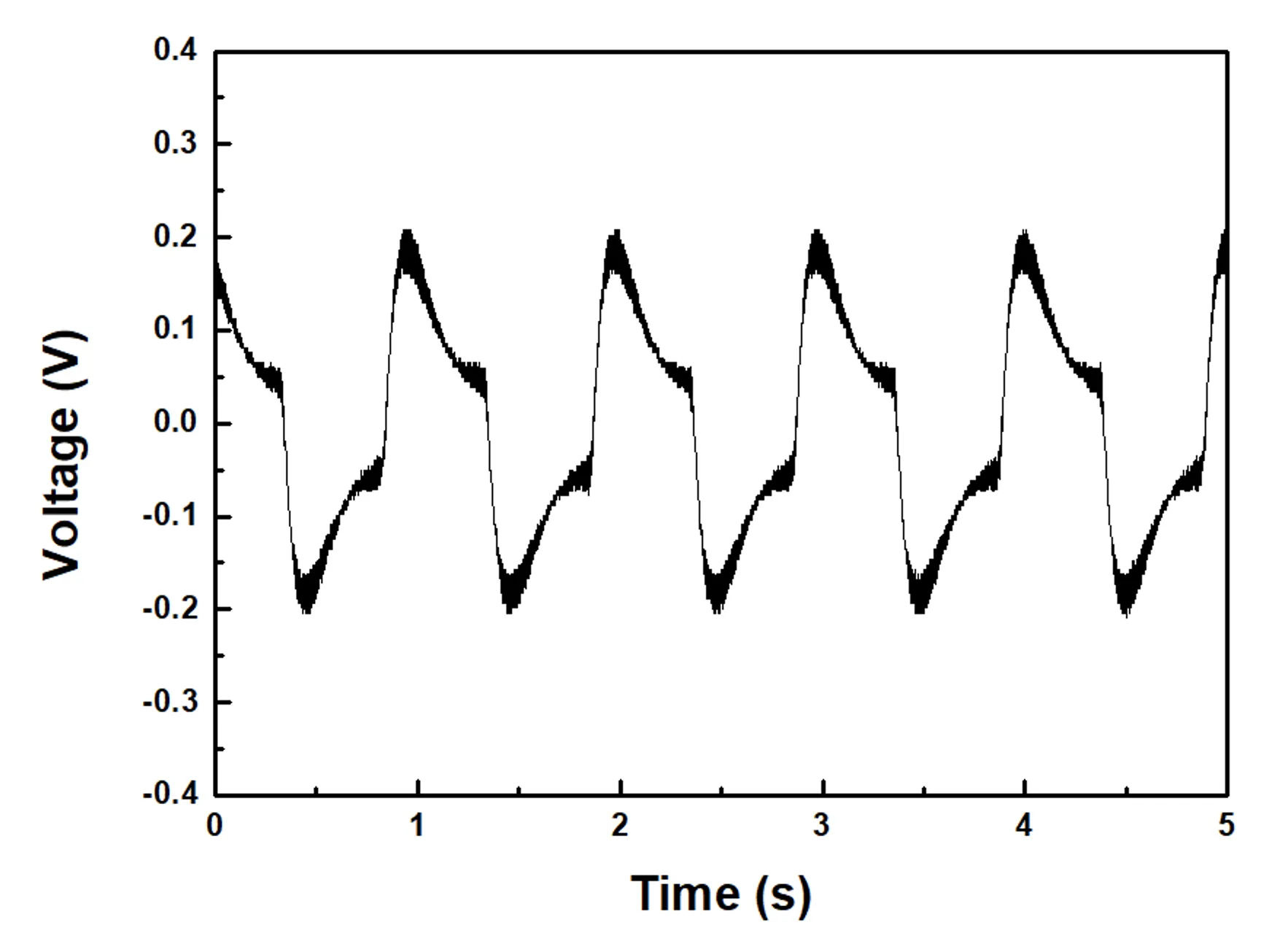
그림 1. 센서가 분리된 상태에서 측정 결과
2) 노이즈의 발생원이 무엇일까?
노이즈를 감소시킬 가장 기본적인 방법은 노이즈 발생원과의 이격 혹은 차폐입니다. 그리고 전선에 흐르는 전류나 전선의 연결부인 커넥터 부분은 대개 노이즈의 발생원으로 꼽을 수 있습니다. 따라서 전선 혹은 커넥터 부분을 노이즈 발생원으로 판단하여 이격을 시도했습니다.
그 결과는 그림 2와 같습니다. 그래프에서 Near라고 표시된 부분은 전선 및 커넥터 부분과 가까이 있을 때의 계측 결과이고, Far라고 표시된 부분은 반대로 멀리 있을 때의 계측 결과입니다.
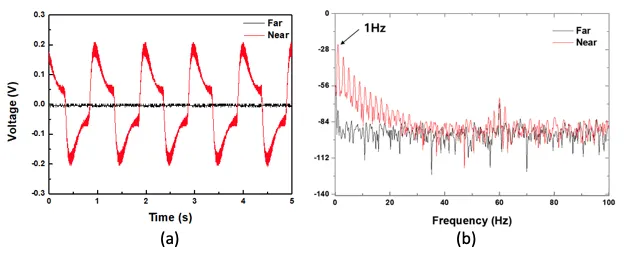
그림 2. DAQ를 전선과 커넥터로부터 이격한 후 측정 결과 (a)시간 영역, (b)주파수 영역
그림 2와 같이 DAQ 가 노이즈 발생원으로부터 멀리 이격된 경우에는 주파수 영역의 1 Hz에서 -75.14 dBV 로, 문제 상황에서의 -38.53 dBV 에 비해 노이즈 성분이 매우 적은 수준으로 계측됨을 확인했습니다.
반면에 가까이 있는 경우에는 시간 영역에서 peak to peak가 0.2 V 정도로 크고 주파수 영역에서 주요 peak는 동일하게 1Hz 로, 노이즈가 이전과 같이 발생함을 파악했습니다.
따라서 아직 센서에 의한 영향은 알 수 없지만 DAQ 가 노이즈 발생원에 의해 영향을 받아서 노이즈가 발생했다는 결론을 도출했습니다.
하지만 DAQ의 외부 케이스 구조나 내부 회로 기판 구조 등이 노이즈와 반응할 수 있기 때문에 실제로 측정된 노이즈가 위에서 측정한 데이터와 같은 파형인지, 혹은 DAQ 구조에 영향을 받아 증폭 혹은 왜곡되어 위와 같은 파형을 갖게 된 것인지에 대해 보다 정확한 파악이 필요합니다.
3) 노이즈가 DAQ의 구조와 상호작용하여 증폭된 것은 아닐까?
발생한 노이즈가 DAQ의 특정 구조와 반응하여 증폭 혹은 왜곡된 것인지 확인하기 위하여 간이 테스트를 진행했습니다. 간이 테스트는 Dipole antenna라는 일종의 안테나 형태를 이용해서 전선 및 커넥터에서 발생할 것으로 예상되는 복사형 노이즈를 측정하는 방식으로 구성해보았습니다.

그림 3. Dipole antenna를 제작하여 노이즈 측정하는 모습
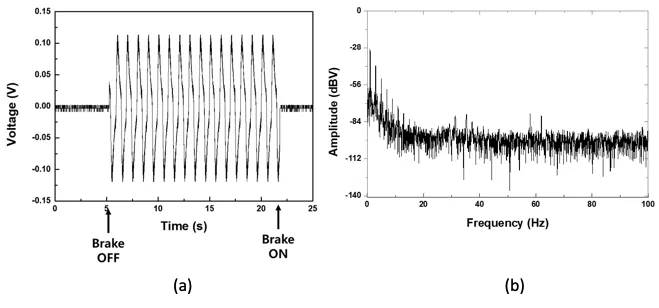
그림4. Dipole antenna를 통한 노이즈 측정결과 (a)시간 영역, (b)주파수 영역
Dipole antenna를 사용하여 노이즈를 측정해본 결과, 이전에 계측된 데이터의 형태와 같은 형태로, 1Hz에서 peak가 관찰됨을 파악했습니다.
따라서 발생한 노이즈가 DAQ의 특정 구조와 반응하여 증폭되는 것이 아니라 전선 및 커넥터 부분이 원천적인 노이즈의 발생원이라는 사실을 검증했습니다.
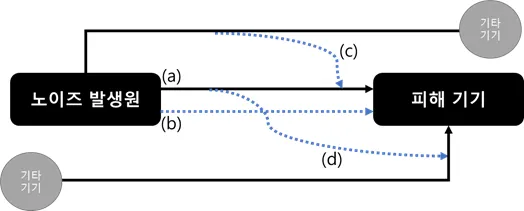
그림5. 노이즈의 전달 경로 모식도
•
(a) : CE(Conduction Emission, 전도성 방출) : 도체를 통해 전달되는 경로
•
(b) : RE(Radiated Emission, 복사성 방출) : 공간을 통해 전달되는 경로
•
(c) : CE → RE : 처음에는 도체를 통해 전달되다가 중간에 도체가 아닌 공간을 통해 전달되는 경로
•
(d) : RE → CE : 처음에는 공간을 통해 전달되다가 중간에 공간이 아닌 도체를 통해 전달되는 경로
하지만 위의 모식도를 참고하면 문제해결 (1)에서 한 과정은 RE만을 확인한 것이었기 때문에 전류센서와 연결될 경우 RE → CE 를 통해서 다시 노이즈가 전달된 것으로 가능성이 있습니다.
이후 상술할 실험을 통해 실제로 전류센서와 연결될 경우 이격을 했음에도 노이즈가 다시 DAQ에서 계측되는 현상을 확인하였습니다.
물론 이격을 시도했을 때 노이즈 자체는 기존에 비해 상당 부분 줄긴 했지만 양질의 계측을 위해 전류 센서에 의한 노이즈를 저감시키는 다음과 같은 시도를 해보았습니다.
문제 해결 (2) Current Transformer의 사용
CT(Current Transformer)는 특성상 저주파수의 신호는 측정하지 못하기 때문에 센서 자체가 HPF(High Pass Filter)라고 볼 수 있습니다. 그리고 모터의 작동 주파수는 30Hz 이상으로 높기 때문에 CT의 HPF 특성으로 인해 오히려 원 신호를 필터링할 가능성은 거의 없다고 생각할 수 있습니다.
또한 기존에 사용했었던 Hall effect sensor는 동작을 위해 DC(Direct Current) 전원을 공급받아야 하는데, 전원 공급에서의 노이즈(CE) 역시 간과할 부분은 아닙니다. 반면에 CT의 경우 전원을 공급받지 않으므로 전원 공급에서의 노이즈는 고려하지 않아도 된다는 장점이 있습니다.
.jpg&blockId=b2ac3045-4473-40af-bdb1-a43c5c693a51)
그림 6. CT를 활용하여 측정하는 모습
CT의 기본 특징
따라서 저주파수 영역을 아날로그 방식으로 필터링하고 전원 노이즈 제거를 통해 노이즈를 저감시킬 수 있을 것이라 판단하여 CT를 도입하여 실험해보았습니다. 그리고 이전 과정에서 얻은 교훈인 노이즈의 발생원과의 이격 또한 기본적으로 적용된 상태입니다.
이 때 Hall effect sensor의 sensitivity는 64 mV/A 이고 CT의 sensitivity는 200 mV/A 로, 같은 1V의 노이즈가 발생하였다고 했을 때 Hall effect sensor 가 노이즈에 의한 영향이 큽니다(노이즈에 더 취약합니다). 하지만 본 실험에서는 sensitivity 는 고려하지 않고 절대적인 수치만을 고려할 예정입니다.
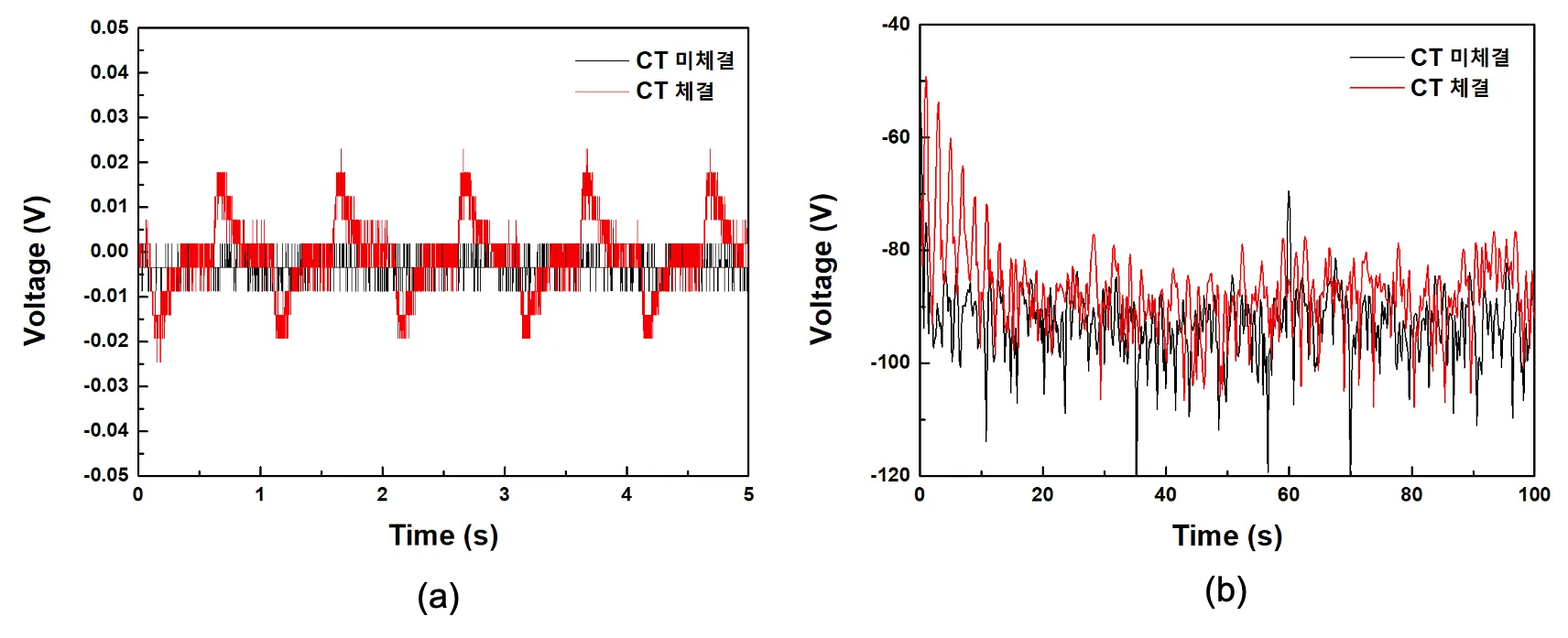
그림 7. 기본 상태 노이즈(이격 후)와 CT 체결 후 노이즈 비교 (a)시간 영역, (b)주파수 영역
그림 7을 보면 이전에 언급했던 것처럼, 노이즈 발생원과 충분한 이격을 했음에도 불구하고 복사성 노이즈가 회로를 통해 다시 DAQ에 들어오는 현상(RE → CE)이 관찰됨을 알 수 있습니다.
센서를 체결하기 전 1Hz에서 -75.14 dBV 대비 센서 체결 후 -49.23 dBV로 큰 폭으로 증가하였지만 기존의 문제상황에 비하면 1Hz에서 -38.53 dBV 대비 -49.23 dBV로, 상당부분 감소함을 알 수 있습니다.
위 실험은 노이즈가 회로를 통해 다시 DAQ에 들어오는 현상을 확인한 것이고, 보다 직접적인 센서간의 비교를 위해 추가 실험을 진행하였습니다.
Hall effect sensor를 사용하면 구조상 DAQ가 전선 및 커넥터 근처에 있어야 합니다. 따라서 정확한 비교를 위해 Hall effect sensor와 CT를 사용할 때 두 경우 모두 DAQ를 노이즈 발생원 가까이 동일한 위치에 놓은 채 실험하였고 그 결과는 그림 8에 나타나있습니다.
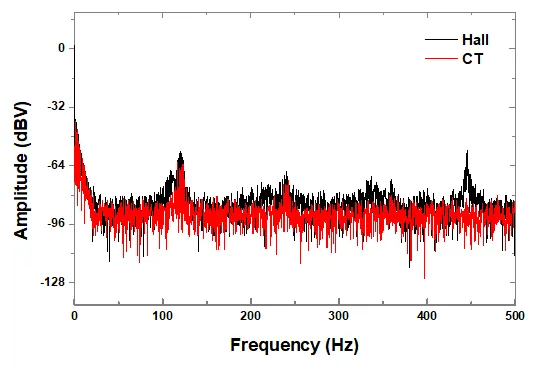
그림 8. Hall effect sensor와 CT 체결 후 주파수 영역에서 전반적 노이즈 비교 (near)
그림 8은 Hall effect sensor와 CT 체결 후 브레이크만 해제시켰을 때의 노이즈를 주파수 영역에서 비교한 것입니다.
Hall effect sensor의 1Hz 성분은 -38.52 dBV 이고, CT의 1Hz 성분은 -39.62dBV 로 노이즈가 크게 감소한 것은 아니지만 2,4,6 … 등의 하모닉 성분은 크게 줄었으며 전반적으로 깔려있는 노이즈가 Hall effect sensor가 CT보다 큰 것을 알 수 있습니다.
따라서 근본적으로 이 시스템에선 CT로 측정하는 것이 Hall effect sensor를 활용하여 측정하는 것보다 노이즈 측면에서 강건함을 확인하였습니다.
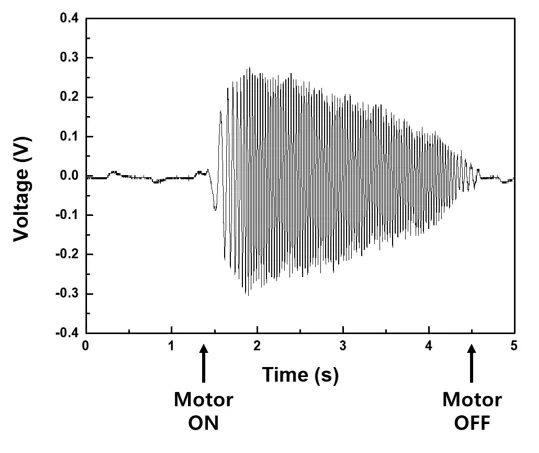
그림 9. CT를 통한 측정 결과 (SNR 비교)
노이즈원과의 이격을 수행하고 CT를 통해 측정한 결과는 그림 9에서와 같이 모터 동작시에도 원 신호가 노이즈에 크게 영향을 받지 않는 모습을 보여줬습니다.
이는 CT의 영향도 있지만, CT와 연결된 케이블이 Twisted Pair 구조로 되어 있기 때문에 외부 노이즈를 감소시키는데 일조하였다고 판단했습니다.
Twisted Pair 구조는 왜 노이즈를 감소시킬까요?
하지만 기본 상태 노이즈와 CT 체결 후 노이즈 비교에서 보이듯, 아직 기본 상태에 비해 노이즈가 어느 정도 검출되므로 더 나아가 노이즈를 더 줄일 방안에 대해 생각해봤습니다.
문제 해결 (3) Differential input 사용
이전까지 사용한 DAQ는 USB-6000으로, RSE(Referenced single-ended) 타입으로만 계측 가능한 장비였습니다. 여기에서 조금의 업그레이드를 거친 제품이 USB-6001인데, 이 DAQ의 경우 Differential 타입이 가능한 장점이 있습니다. 보통 RSE 타입에 비해 Differential 타입이 노이즈에 강하다고 알려져 있으므로 여기에서는 USB-6001를 활용하여 측정해보려고 합니다.
RSE와 Differential 타입 측정 시스템의 비교
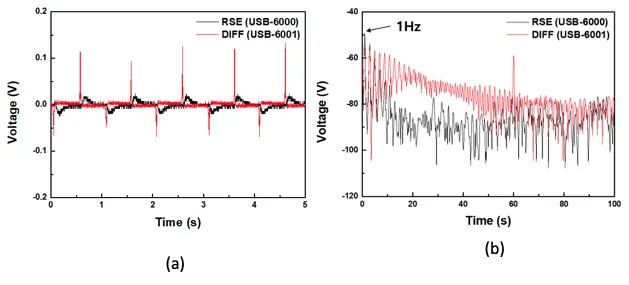
그림10. RSE 타입과 DIFF(Differential)타입의 기본 노이즈 비교 (a)시간 영역, (b)주파수 영역
기본 노이즈를 측정해보면 위의 그래프와 같이 오히려 기존의 RSE 타입보다 노이즈의 peak to peak가 큰 현상이 발생합니다(갑자기 신호값이 튀는 서지성 혹은 임펄스성 노이즈입니다.).
주파수 영역을 보면 1Hz에서 RSE 타입에서 -49.23 dBV였던 값이 DIFF 타입에서 -54.33 dBV로 감소하였지만 0 ~ 100 Hz까지의 전반적인 노이즈레벨은 오히려 높고 특히 60Hz의 전원주파수 노이즈(-58.88 dBV)가 매우 커짐을 볼 수 있습니다.
이는 CT에 연결된 케이블을 둘러싼 shield를 플로팅 상태로 놔두어서, 오히려 노이즈에 영향을 받는 상태가 되었기 때문입니다. (RSE 타입은 V-와 shield를 연결하여 사용. DIFF 타입은 이 방식의 경우 노이즈 저감 효과 적음)
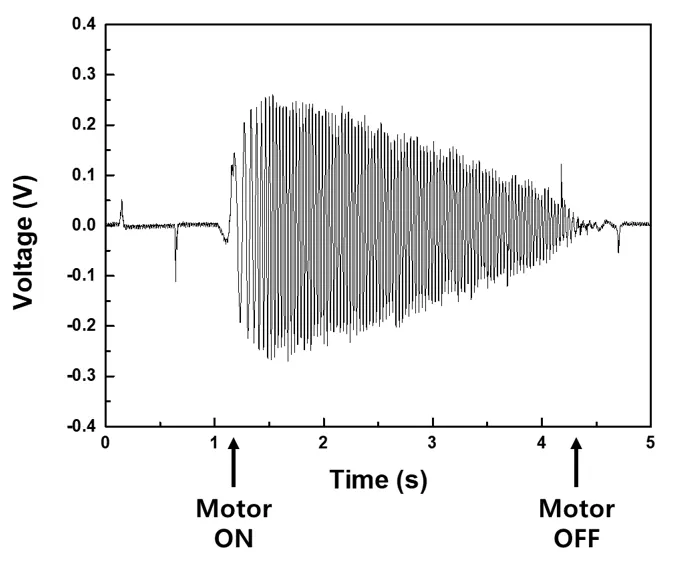
그림 11. CT, Differential Input 사용 후 서보모터 동작 중 측정 결과
서보모터 동작 중 측정결과를 보더라도 그림 11에서 볼 수 있듯, 동작하기 전 후에 임펄스성 노이즈가 관찰됨을 확인할 수 있습니다.
Differential 측정 시스템의 구조도에서 AI GND 부분에 shield 부분을 연결하여 측정하면 shield 가 플로팅 상태가 아닌 영전위를 가져서 정전차폐(e.g. faraday’s cage)를 하는 역할을 수행합니다.
쉴딩한 후의 결과는 다음과 같습니다.
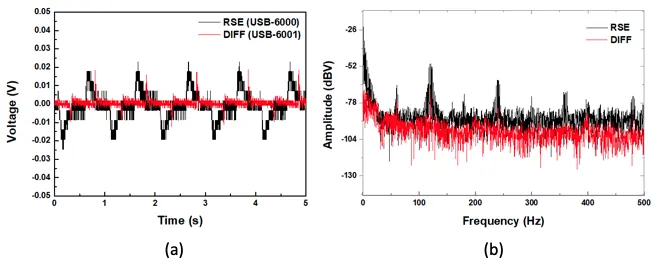
그림 12. RSE 타입과 DIFF(shielding 완료)타입의 기본 노이즈 비교 (a)시간 영역, (b)주파수 영역
그림 12에서와 같이 노이즈가 현저하게 줄어듦을 눈으로도 확연히 구분할 수 있습니다. 특히나 RSE타입의 1Hz 성분은 -49.23 dBV, DIFF 타입의 1Hz 성분은 -69.54 dBV로, 노이즈가 약 20 dB만큼 감소함을 알 수 있습니다.
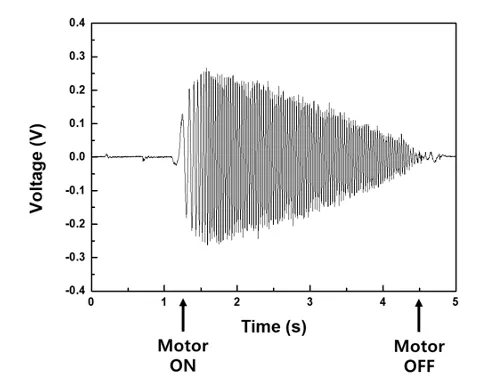
그림 13. CT, Differential Input, shielding을 통한 측정 결과
그림 13은 서보모터 동작 중 계측한 그래프입니다. 이전과 달리 노이즈가 신호에 거의 영향을 미치지 않음을 볼 수 있습니다.
결과 정리
이렇게 해서 계측 과정에서 노이즈에 대응하기 위한 다양한 방법들을 살펴보았습니다. 문제의 해결 과정은 다음과 같은 순서로 진행되었습니다.
처음의 문제상황에서는 노이즈가 신호보다 클 정도로 심각한 수준(1Hz Amplitude -38.53 dBV)이었습니다.
첫째, 전류센서를 분리하고 전선 및 커넥터와의 이격을 시도해본 결과 1Hz에서 Amplitude가 -38.53 dBV에서 -75.14 dBV로 크게 감소하였습니다. 따라서 전선 및 커넥터가 노이즈원임을 확인하였습니다.
둘째, 노이즈원과 이격 후 CT로 전류센서 종류를 바꾼 결과 1Hz에서 기존의 -38.53 dBV 대비 -49.23 dBV로 감소하였습니다.
셋째, DAQ의 종류를 Differential input로 변경하여 1Hz에서 -54.33 dBV로 노이즈를 줄였지만 임펄스성 노이즈가 관찰되고 0~100Hz에서 전반적인 노이즈가 더 증가하였습니다.
넷째, 해결책을 보완하기 위해 Floating 된 Shield의 Grounding을 통해 1Hz에서 -69.54 dBV로 노이즈를 크게 감소시켰고, 추가적으로 임펄스성 노이즈 및 0~100Hz에서 전반적인 노이즈 또한 감소시켰습니다.
각 과정들을 통해 개선된 노이즈는 그림 14를 통해 시각적으로 확인할 수 있습니다. (a)에서 처음 노이즈가 관찰되었던 것과 비교하면 눈에 띄게 줄어들었다는 것을 알 수 있습니다.
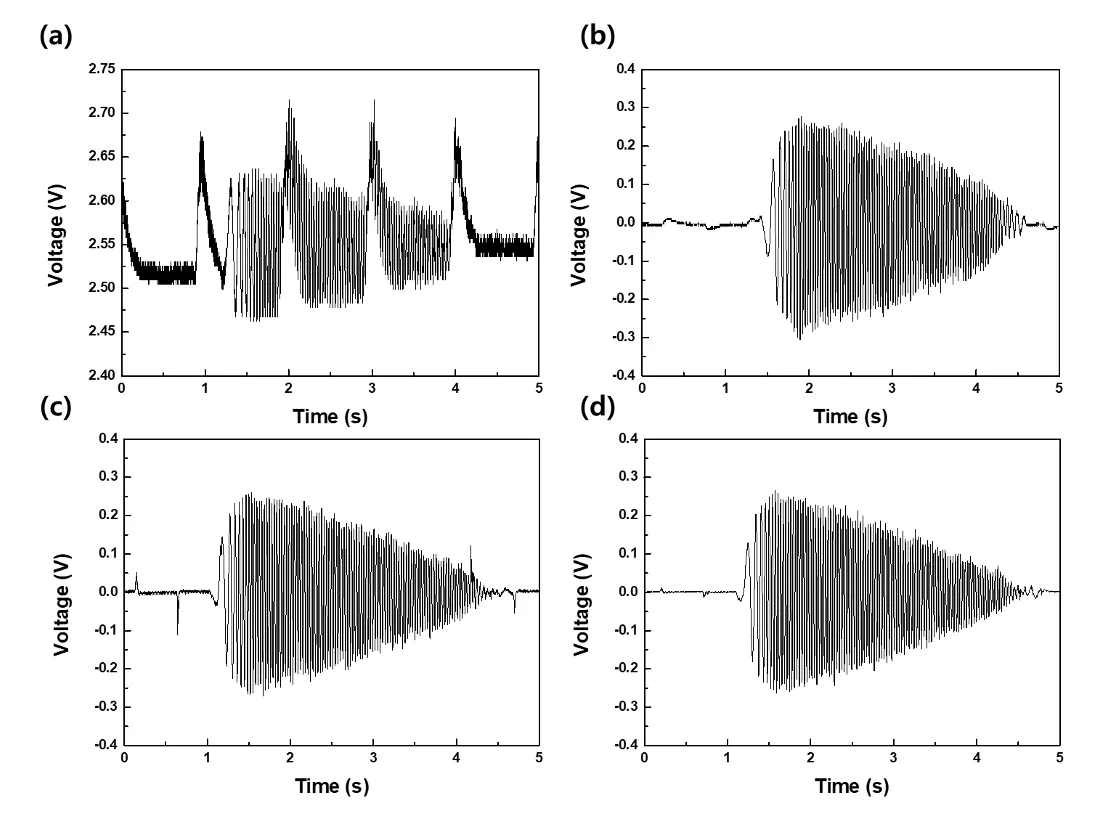
그림 14. 모터를 동작시켰을 때 신호 비교 (a)문제 상황, (b)노이즈원과의 이격 및 CT 사용, (c)Differential input 사용, (d) shielding 사용
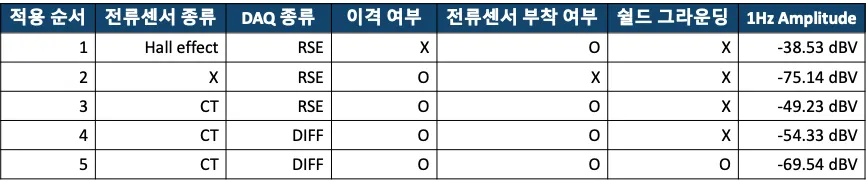
표 1에서는 지금까지 수행한 노이즈 저감 대책을 순서대로 나열하였고, 각 시행에 따른 측정 환경과 1Hz에서의 Amplitude를 비교해 각 대책의 실효성을 수치적으로 확인할 수 있습니다.
Conclusion
지금까지 특정 노이즈에 대한 기본적인 특성과 발생 이유에 대해 알아보고 이를 저감하는 방안에 대해 서술했습니다. 저감하는 방안으로는 노이즈 발생원으로부터의 이격, CT를 활용한 아날로그 HPF, Twisted Pair를 이용한 노이즈 상쇄, Differential 타입의 측정 시스템을 통한 노이즈 상쇄, shielding을 이용하여 정전차폐를 통한 노이즈 차단 방법들을 사용하였습니다.
본 글에서 서술한 방식의 노이즈 디버깅 기술 이외에도 PCB 설계나 회로적인 접근을 통한 노이즈 저감 방식 등등이 있지만 대표적이고 간단하게 적용할 수 있는 기술을 먼저 도입해보았습니다.
이를 통해 결론적으로 주 노이즈 성분인 1Hz 성분에서 처음의 -38.52dBV에서 마지막엔 -69.54 dBV로 획기적인 감소를 이끌어냈으며, 전반적인 노이즈 역시 상당 부분 감소하여 SNR을 크게 높이는 결과를 이끌어냈습니다.
IoT 이어보기
•
서보모터 노이즈 저감 대책 (2) (현재 글)
참조
이 글을 쓴 사람

유 건 우 | IoT 팀
맛있는걸 먹고, 사람들과 공유하는 것을 좋아합니다.
로봇을 타겟으로 삼아 계측 시스템을 구성하고 있습니다.
이 외에도 항상 새로운 것을 배우며 성장중입니다.
원프레딕트 홈페이지
https://onepredict.ai/
원프레딕트 블로그
https://blog.onepredict.ai/
원프레딕트 기술 블로그
https://tech.onepredict.ai